応用線形代数 I
線形代数の例:
\[ a_1 x_1 + a_2 x_2 \cdots + a_n x_n = y \]
線形代数ではないの例:
\[ \frac{a_1 x_1 + a_2 x_2 \cdots + a_n x_n}{b_1 x_1 + b_2 x_2 \cdots } = y \]
1. *実習課題のグラフの保存方法について
使用するパケージ
今回の授業は Plots と 線形代数用の関数を使うので、下記の指令を一度実行してください。
julia> using LinearAlgebra #これは内蔵されたパケージです。
julia> using Plots #前回使った plot の追加パケージです。
Julia ターミナル(REPL)の操作 Tips
• 矢印 キー
• 矢印 キー
グラフ
グラフは「挿入」でワードに載せてください。
• Plots のパケージには、2つの裏プログラム(backend): gr と plotly がある。
•
► plotly は日本語の表示ができる。
► 初期の指定が必要です。
•
► デフォルトの backend となる。初期の指定は必要ない。
► plotly より、処理が早い。
► gr で作成したグラフは 関数
julia> savefig("ファイル名.png" )
• ファイルの保存先は Julia の
• 「作業フォルダー」は関数
julia> pwd()
"/Users/leechuin/Documents/データサイエンス_2020/Topic4_MatrixOperation"
pwd() は Print Working Directory 「作業フォルダーを印刷・表示」するという指令です。
2. Vector and Matrix ベクトルと行列
ベクトル
例1:
\[ \mathbf{a} = \hat{\mathbf{x}} + 2\hat{\mathbf{y}} + 3\hat{\mathbf{z}} = \begin{pmatrix} ~1~ \\2\\3 \end{pmatrix}\]
Julia は一次元の配列を「ベクトル」として扱っています。
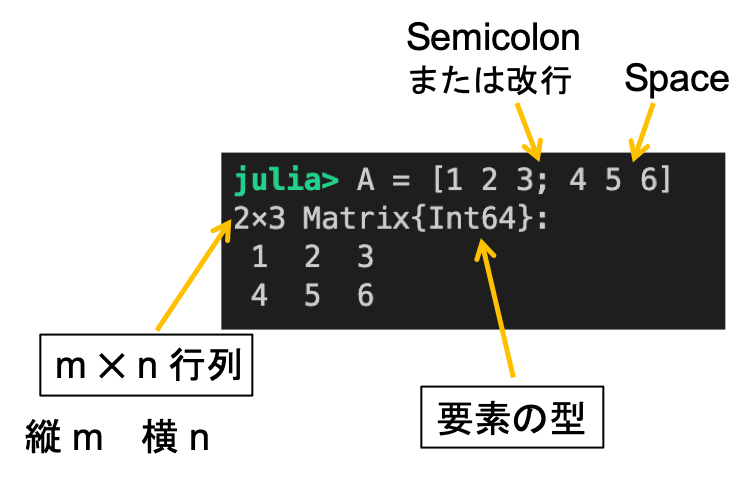
行列
例1\(1\times3\),\(2\times2\),\(2\times3\)の行列:
\[\begin{pmatrix}~1 & 2 & 3~\end{pmatrix} ,~~\begin{pmatrix}~1 & 2 \\ 3 & 4~\end{pmatrix}, ~~\begin{pmatrix}~1 & 2 & 3 \\ 3 & 4 & 5~\end{pmatrix}\]
例2\( m\times n \) 行列:
\[ \begin{pmatrix}a_{11} & a_{12} & \cdots & a_{1n}\\a_{21} & a_{22} & \cdots & a_{2n}\\\vdots & \vdots & \ddots & \vdots\\a_{m1} & a_{m2} & \cdots & a_{mn}\end{pmatrix} \]
Julia は多次元の配列を行列として扱っています。
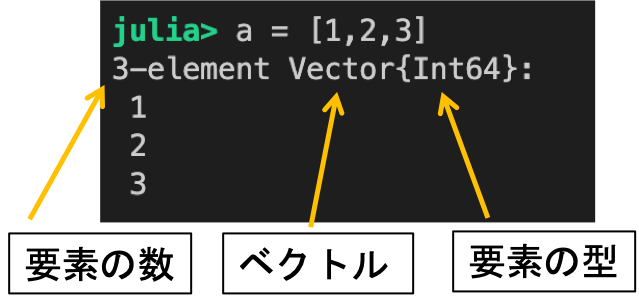
練習:ベクトルと行列の定義
julia> a = [1 , 2 , 3 ] #これはベクトルです。
3 -element Array{Int64,1 }:
1
2
3
julia> B = [1 2 3 ] #これはベクトルではなく,行列です。
1×3 Array{Int64,2 }:
1 2 3
julia> A = [1 2
3 4 ]
2×2 Array{Int64,2 }:
1 2
3 4
julia> A = [1.1 1.2 1.3 ; 2.1 2.2 2.3 ; 3.1 3.2 3.3 ]
3×3 Array{Float64,2 }:
1.1 1.2 1.3
2.1 2.2 2.3
3.1 3.2 3.3
3. 行列の自動作成
Zeros & Ones
関数
•
•
julia> zeros(4 )
4 -element Array{Float64,1 }:
0.0
0.0
0.0
0.0
julia> zeros(4,4 )
4×4 Array{Float64,2 }:
0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0
関数
•
•
julia> ones(3 )
3 -element Array{Float64,1 }:
1.0
1.0
1.0
julia> ones(2,3 )
2×3 Array{Float64,2 }:
1.0 1.0 1.0
1.0 1.0 1.0
4. 多次元行列の要素・部分を取り出す方法
2次元行列
要素を取り出す
julia> A = [1 2 3 ; 4 5 6 ; 7 8 9 ]
3×3 Array{Int64,2 }:
1 2 3
4 5 6
7 8 9
julia> A[1,1 ] #縦1、横1の要素
1
julia> A[2,1 ] #縦2、横1
4
julia> A[2,2 ]
5
部分を取り出す
julia> A = [1 2 3 ; 4 5 6 ; 7 8 9 ]
3×3 Array{Int64,2 }:
1 2 3
4 5 6
7 8 9
julia> A[1 ,:] #縦1, 横は全て
3 -element Array{Int64,1 }:
1
2
3
julia> A[:,2 ] #縦 all, 横2
3 -element Array{Int64,1 }:
2
5
8
julia> A[3 , 2:3 ] #縦3, 横は 2から3
2 -element Array{Int64,1 }:
8
9
3次元行列
julia> A=zeros(2,2 ,2 ) #まずは行列の形を定義する。
2×2 ×2 Array{Float64,3 }:
[:, :, 1 ] =
0.0 0.0
0.0 0.0
[:, :, 2 ] =
0.0 0.0
0.0 0.0
julia> A[:, :, 1 ] = [1 2 ; 3 4 ] #2次元の部分を手動で定義する。
2×2 Array{Int64,2 }:
1 2
3 4
julia> A[:, :, 2 ] = [5 6 ; 7 8 ] #もう1つ2次元の部分を定義する。
2×2 Array{Int64,2 }:
5 6
7 8
julia> A
2×2 ×2 Array{Float64,3 }:
[:, :, 1 ] =
1.0 2.0
3.0 4.0
[:, :, 2 ] =
5.0 6.0
7.0 8.0
julia> A[2,2 ,1 ]
4.0
julia> A[1,2 ,2 ]
6.0
5. 行列の積
A と B 行列があって、A の列数と B の行数が等しいであれば AB が定義される。
例えば A が (m × n) 行列で 、B が (n × p) 行列で、AB が (m × p) の行列となる。
\[\mathbf{AB} = \begin{pmatrix}\color{darkred} a_{11} & \color{darkred} a_{12} & \cdots & \color{darkred} a_{1n} \\\color{darkgreen} a_{21} & \color{darkgreen}a_{22} & \cdots & \color{darkgreen}a_{2n} \\\color{black} \vdots & \vdots & \ddots & \vdots \\\color{darkblue} a_{m1} & \color{darkblue} a_{m2} & \cdots & \color{darkblue} a_{mn} \\\end{pmatrix}\begin{pmatrix}\color{darkred} b_{11} & \color{darkgreen} b_{12} & \cdots & \color{darkblue}b_{1p} \\\color{darkred} b_{21} & \color{darkgreen} b_{22} & \cdots & \color{darkblue}b_{2p} \\\color{darkred} \vdots & \color{darkgreen} \vdots & \ddots & \color{darkblue}\vdots \\\color{darkred} b_{n1} & \color{darkgreen} b_{n2} & \cdots & \color{darkblue}b_{np} \\\end{pmatrix} = \begin{pmatrix}\color{darkred} c_{11} & c_{12} & \cdots & c_{1p} \\c_{21} & \color{darkgreen}c_{22} & \cdots & c_{2p} \\\vdots & \vdots & \ddots & \vdots \\c_{m1} & c_{m2} & \cdots & \color{darkblue}c_{mp} \\\end{pmatrix}\]
\[ c_{ij} = a_{i1}b_{1j} + a_{i2}b_{2j} + \cdots + a_{in}b_{nj} = \sum_{k=1}^{n}a_{ik}b_{kj}\]
練習:簡単の例
\[\begin{pmatrix}1 & 2 \\3 & 4\end{pmatrix}\begin{pmatrix}~5~\\6\end{pmatrix} = \begin{pmatrix}1\cdot5 + 2\cdot6\\3\cdot5 + 4\cdot6\end{pmatrix}=\begin{pmatrix}17\\39\end{pmatrix}\]
julia> [1 2 ; 3 4 ] * [5 ; 6 ]
2 -element Array{Int64,1 }:
17
39
*実習:Juliaを使って、次の計算を行う
\[ \mathbf{A} = \begin{pmatrix} 1&2&3 \\4&5&6\\7&8&9\end{pmatrix},~~\mathbf{B} = \begin{pmatrix} 2&7&6 \\9&5&1\\4&3&8\end{pmatrix},~~\mathbf{U} = \begin{pmatrix} 1\\3\\5 \end{pmatrix},~~\mathbf{V} = \begin{pmatrix} 2&4&6 \end{pmatrix}\]
a) \( \mathbf{AB} \)
b) \( \mathbf{BA} \)
c) \( \mathbf{AU} \)
d) \( \mathbf{UV} \)
e) \( \mathbf{VU} \)
6. Transposed Matrix 転置行列
定義:
\[\mathbf{A} = \begin{pmatrix}\color{darkred} a_{11} & \color{darkgreen} a_{12} & \cdots & \color{darkblue}a_{1n} \\\color{darkred} a_{21} & \color{darkgreen} a_{22} & \cdots & \color{darkblue}a_{2n} \\\color{darkred} \vdots & \color{darkgreen} \vdots & \ddots & \color{darkblue}\vdots \\\color{darkred} a_{m1} & \color{darkgreen} a_{m2} & \cdots & \color{darkblue}a_{mn} \\\end{pmatrix},~~~~\mathbf{A}^T = \begin{pmatrix}\color{darkred} a_{11} & \color{darkred} a_{21} & \cdots & \color{darkred} a_{m1} \\\color{darkgreen} a_{12} & \color{darkgreen}a_{22} & \cdots & \color{darkgreen}a_{m2} \\\color{black} \vdots & \vdots & \ddots & \vdots \\\color{darkblue} a_{1n} & \color{darkblue} a_{2n} & \cdots & \color{darkblue} a_{mn} \\\end{pmatrix}\]
• (m × n) の 行列を 転置 (transpose)したら、 (n × m) の行列になります。
練習:transpose 関数
julia> A = [1 2 3 ; 4 5 6 ]
2×3 Array{Int64,2 }:
1 2 3
4 5 6
julia> AT = transpose(A)
3×2 LinearAlgebra.Transpose{Int64,Array{Int64,2 }}:
1 4
2 5
3 6
練習:対称行列
定義:\(B^T = B\). 例:
\[ \begin{pmatrix}1 & \color{red} 7 & \color{red}3 \\\color{green}7 & 4 & \color{red}5\\\color{green}3 & \color{green}5 & 6\end{pmatrix}\]
対称行列は\(B=A^TA\) で作成できる。
julia> A = rand(0:1 , (5,5 )) #任意の正方行列を作成
5×5 Array{Int64,2 }:
0 1 0 1 0
1 1 1 0 0
0 0 1 1 0
1 1 0 0 1
0 1 1 0 0
julia> B = transpose(A)*A #対称行列を作成
5×5 Array{Int64,2 }:
2 2 1 0 1
2 4 2 1 1
1 2 3 1 0
0 1 1 2 0
1 1 0 0 1
julia> transpose(B) == B #確認
true
7. ベクトルの内積 (dot product)
内積 (dot product)の定義 (3次元):
\[\mathbf{a} \cdot \mathbf{b} =\begin{pmatrix}~a_x~\\a_y\\a_z\end{pmatrix}\cdot\begin{pmatrix}~b_x~\\b_y\\b_z\end{pmatrix}= a_x~b_x + a_y~b_y + a_z~b_z\]
内積 (dot product)の定義 (多次元):
\[\mathbf{a} \cdot \mathbf{b} =\begin{pmatrix}~a_1~\\a_2\\\vdots\\a_m\end{pmatrix}\cdot\begin{pmatrix}~b_1~\\b_2\\\vdots\\b_m\end{pmatrix}= a_1~b_1 + a_2~b_2 + \cdots + a_m~b_m\]
転置行列で内積の計算ができる:
\[ \mathbf{a} \cdot \mathbf{b} = \mathbf{a}^T \mathbf{b} = \begin{bmatrix} a_1 & a_2 &\cdots &a_n\end{bmatrix}\begin{bmatrix} b_1 \\ b_2 \\\vdots \\b_n\end{bmatrix}\]
練習:内積の計算
方法1)関数
julia> a = [1 , 2 , 3 ];
julia> b = [4 , 5 , 6 ];
julia> Y = sum( a .* b )
32
方法2:転置行列で算出
julia> transpose(a) * b
32
方法3:関数
julia> using LinearAlgebra #すでに実行したら、やらなくて良い。
julia> dot(a, b)
32
*実習:内積の計算時間を比較
大規模の列を使って、内積の計算時間を比較する。
•
• 先に、乱数の数を下記の例より少なめ、例えば 10^7 にして、パソコンの問題がなければ、この数を10^8にする。
julia> x = rand(10^8 ) #乱数1億個の列を作成。
100000000 -element Array{Float64,1 }:
0.5474144020792362
0.6168312211817326
⋮
0.538102094829189
0.958668265292917
julia> @time sum( x .* x ) #方法(1)
0.500417 seconds (248.22 k allocations: 775.753 MiB, 0.84 % gc time)
3.332812374812943 e7
julia> @time sum( x .* x ) #2回実行したら、時間が一定の範囲内に落ち着く。
0.404328 seconds (5 allocations: 762.940 MiB, 11.87 % gc time)
3.332812374812943 e7
julia> @time transpose(x) * x #方法(2)転置行列の方法
0.059195 seconds (55.41 k allocations: 3.084 MiB)
3.332812374812948 e7
julia> @time transpose(x) * x
0.043327 seconds (2 allocations: 32 bytes)
3.332812374812948 e7
どれが早いですか?
8. 行列式 Determinant
数式の書き方:
\[ \det{\mathbf{A}} = |\mathbf{A}| = \begin{vmatrix}a_{11} & a_{12} & \cdots & a_{1n} \\a_{21} & a_{22} & \cdots & a_{2n} \\\vdots & \vdots & \ddots & \vdots \\a_{m1} & a_{m2} & \cdots & a_{mn} \\\end{vmatrix}\]
行列式の定義
\[ \begin{vmatrix}a & b \\c & d \\\end{vmatrix} = ad - bc\]
\[ \begin{vmatrix}a & b & c\\d & e & f \\g & h & i \\\end{vmatrix} ~=~ a\begin{vmatrix}e & f \\h & i \\\end{vmatrix}~-~ b\begin{vmatrix}d & f \\g & i \\\end{vmatrix}~+~ c\begin{vmatrix}d & e \\g & h \\\end{vmatrix}\]
\[ \begin{vmatrix}a & b & c & d\\e & f & g & h\\i & j & k & l\\m & n & o & p\\\end{vmatrix} ~=~ a\begin{vmatrix}f & g & h\\j & k & l\\n & o & p\\\end{vmatrix}~-~ b\begin{vmatrix}e & g & h\\i & k & l\\m & o & p\\\end{vmatrix}~+~ c\begin{vmatrix}e & f & h\\i & j & l\\m & n & p\\\end{vmatrix}~-~ d\begin{vmatrix}e & f & g \\i & j & k \\m & n & o \\\end{vmatrix}\]
物理的な意味
例1:ベクトルの絶対値
• \( |\vec{A}| = \sqrt{3^2 + 4^2} = 5\) → 長さ
例2:(2 × 2) 行列の行列式
\[ |\mathbf{A}| =\begin{vmatrix}2 & 1 \\1 & 3 \\\end{vmatrix} = 2 \times3 - 1 = 5~~~~→~~面積\]
例3:(3 × 3) 行列の行列式
\[ \begin{vmatrix}2 & 0 & 0\\0 & 3 & 0 \\0 & 0 & 4 \\\end{vmatrix} = 2 \times 3 \times 4 = 24~~~~→~~体積\]
性質
\[\det{\mathbf{A}} = \det{\mathbf{A}^T} \]
練習:関数 det
julia> A = [2 0 0 ; 0 3 0 ; 0 0 4 ]
3×3 Array{Int64,2 }:
2 0 0
0 3 0
0 0 4
julia> det(A)
24.0
julia> A = rand(0:9 , (4,4 ))
4×4 Array{Int64,2 }:
5 9 9 9
1 6 8 6
6 5 2 8
6 1 1 5
julia> det(A)
-314.0
julia> det(transpose(A))
-314.0
9. 逆行列 Inversed Matrix
\(\mathbf{A}^{-1}\)の定義
\[ \mathbf{A}^{-1} \mathbf{A} = \mathbf{I}\]
\(\mathbf{I}\) は単位行列 Identity Matrix
\[ \mathbf{I} =\begin{pmatrix} 1 & 0 & \cdots & 0\\ 0 & 1 & \cdots & 0\\\vdots & \vdots & \ddots & \vdots\\ 0 & 0 & \cdots & 1\\\end{pmatrix}\]
\[ \mathbf{A} = \begin{pmatrix}a & b \\c & d \\\end{pmatrix}\]
\[\mathbf{A}^{-1} = \frac{1}{|\mathbf{A}|}\begin{pmatrix}d & -c \\-b & a \\\end{pmatrix} = \frac{1}{ad - bc}\begin{pmatrix}d & -c \\-b & a \\\end{pmatrix} \]
練習:inv 関数
julia> A = [2 1 ; 1 3 ]
2×2 Array{Int64,2 }:
2 1
1 3
julia> inv(A)
2×2 Array{Float64,2 }:
0.6 -0.2
-0.2 0.4
*実習:inv 関数
julia> A = rand(0:9 , (4,4 ))
4×4 Array{Int64,2 }:
5 5 6 4
8 5 0 6
4 3 0 4
8 8 8 7
julia> B = inv(A)
4×4 Array{Float64,2 }:
2.0 0.25 0.25 -1.5
-8.0 1.0 -4.0 6.0
2.5 -0.375 1.125 -1.75
4.0 -1.0 3.0 -3.0
julia> B*A
4×4 Array{Float64,2 }:
1.0 0.0 1.77636 e-15 0.0
0.0 1.0 -7.10543 e-15 0.0
0.0 0.0 1.0 0.0
0.0 0.0 0.0 1.0
julia> round.(B*A) #四捨五入
4×4 Array{Float64,2 }:
1.0 0.0 0.0 0.0
0.0 1.0 -0.0 0.0
0.0 0.0 1.0 0.0
0.0 0.0 0.0 1.0
10. 線型方程式系 Linear equation system
連立一次方程式とも呼ばれる。
\begin{align}a_{11} x_1 + a_{12} x_2 + \cdots + a_{1n} x_n &= y_1\\a_{21} x_1 + a_{22} x_2 + \cdots + a_{2n} x_n &= y_2\\&\vdots\\a_{n1} x_1 + a_{n2} x_2 + \cdots + a_{nn} x_n &= y_n\end{align}
(n × n)の行列に整理したら
\[\begin{pmatrix}a_{11} & a_{12} & \cdots & a_{1n} \\a_{21} & a_{22} & \cdots & a_{2n} \\\vdots&\vdots & \ddots & \vdots\\a_{n1} & a_{n2} & \cdots & a_{nn} \end{pmatrix}\begin{pmatrix}x_1\\x_2\\\vdots\\x_n\end{pmatrix}=\begin{pmatrix}y_1\\y_2\\\vdots\\y_n\end{pmatrix}\]
簡潔の形:
\[ \mathbf{A}\mathbf{x} = \mathbf{y}\]
一次方程式は逆列の方法で解くことができる。
\[ \mathbf{A}^{-1}\mathbf{A}\mathbf{x} = \mathbf{A}^{-1}\mathbf{y}\]
\[ \mathbf{x} = \mathbf{A}^{-1}\mathbf{y}\]
*実習:inv を使って連立一次方程式を解く
次の連立一次方程式を解け。
\begin{align}p + 2q + r &= 2\\2p + q + r &= 3\\p + q + 2r &= 3\\\end{align}
julia> A = [1 2 1;2 1 1 ; 1 1 2 ] #行列に整理する
3×3 Array{Int64,2 }:
1 2 1
2 1 1
1 1 2
julia> Y = [2,3 ,3 ]
3 -element Array{Int64,1 }:
2
3
3
julia> X = inv(A)*Y
3 -element Array{Float64,1 }:
1.0
2.220446049250313 e-16
0.9999999999999998
julia> round.(X) #四捨五入
3 -element Array{Float64,1 }:
1.0
0.0
1.0
julia> A*X #確認
3 -element Array{Float64,1 }:
2.0
3.0
3.0
*実習:大規模な連立一次方程式の求解シミュレーション
julia> N = 100 ; #この数を変えてみる!
julia> A = rand(0:9 , (N,N)) #ランダムの正方形行列
100×100 Array{Int64,2 }:
5 7 5 5 9 3 5 2 5 9 4 1 7 3 8 0 1 4 5 7 5 … 6 5 9 4 0 2 1 3 1 2 7 9 2 9 4 0 9 6 5 7
2 6 2 4 1 8 2 9 7 6 6 5 6 5 1 8 6 6 5 5 4 1 3 5 5 3 6 8 3 1 3 0 8 4 5 0 2 5 4 1 2
1 1 2 1 1 8 9 3 5 9 8 0 4 0 9 7 6 3 4 9 8 3 8 6 5 3 1 8 9 0 1 2 0 2 6 5 0 7 4 1 6
1 7 8 5 2 8 0 0 0 2 6 0 8 3 6 3 0 3 5 6 4 4 5 8 1 8 4 2 0 0 5 1 7 3 1 7 5 1 7 0 5
5 8 9 4 4 7 6 4 4 5 1 1 4 6 3 9 7 3 4 8 7 4 0 2 4 9 7 1 6 1 0 9 8 5 0 3 8 4 7 5 5
1 8 9 5 3 3 1 3 5 7 8 4 7 4 9 5 3 7 5 9 1 … 8 7 0 1 3 3 2 8 2 2 2 2 5 4 9 6 3 8 7 2
⋮ ⋮ ⋮ ⋮ ⋮ ⋱ ⋮ ⋮ ⋮ ⋮
8 9 1 3 3 9 6 2 3 5 3 3 6 6 6 5 5 4 4 7 8 … 6 5 4 2 8 5 9 1 5 6 3 3 7 9 3 5 0 5 3 5
3 4 3 1 4 9 9 8 7 8 4 1 0 6 7 0 3 3 7 8 8 2 9 0 9 7 0 6 9 2 1 6 2 7 1 3 1 8 4 4 0
9 6 8 3 8 5 3 7 8 0 6 9 1 9 5 0 4 1 3 7 6 5 8 3 6 3 7 7 4 3 8 5 3 8 6 2 2 8 4 9 1
4 8 5 4 5 6 6 7 2 7 5 0 6 1 0 5 0 4 0 2 3 8 5 1 8 7 2 9 5 0 0 2 4 3 5 1 4 5 0 4 2
9 6 5 8 3 9 6 7 5 3 4 5 0 8 0 6 2 2 0 3 3 4 7 4 5 4 2 8 1 4 5 4 5 4 3 4 5 2 4 7 0
julia> Xo = rand(0:9 , N) #「答え」は ランダムの整数列とする。
100 -element Array{Int64,1 }:
1
2
5
2
7
7
⋮
1
3
8
8
5
julia> Y = A*Xo #用意した「答え」を使って、Y 行列を計算
100 -element Array{Int64,1 }:
2081
1970
2288
1876
2135
2037
⋮
1960
1911
2111
1827
1847
julia> X = inv(A)*Y #これが本番。連立一次方程式を解く
100 -element Array{Float64,1 }:
1.0000000000000107
2.000000000000341
5.000000000000256
2.0000000000004547
6.999999999999801
7.0000000000001705
⋮
0.9999999999999432
3.0000000000001705
8.00000000000017
8.00000000000017
4.999999999999545
julia> 二乗和誤差 = sum(X.^2 - Xo.^2 ) #「答えと比較する」
1.771205404566187 e-11
11. Linear Transformation 線形写像
• 線形変換とも呼ばれる。
• 詳しい説明はこちら (wikipedia)
• 入力が u, 変換行列が T, 出力が v とする。
\[ \mathbf{v}= \mathbf{Tu}\]
\[\begin{bmatrix}~\\出力\\(m \times p)\\~\end{bmatrix} = \begin{bmatrix}\mathrm{Transformation}\\\mathrm{Matrix}\\変換行列\\(m \times m)\end{bmatrix}\begin{bmatrix}~\\入力\\(m \times p)\\~\end{bmatrix} \]
平面 (2×2)の線形変換行列の例:
\[\begin{matrix} \theta~\mathrm{rad}回転\\\begin{bmatrix}\cos{\theta} & -\sin{\theta}& \\\sin{\theta} & \cos{\theta}\end{bmatrix}\end{matrix}~~~~~~\begin{matrix} 90 度回転\\\begin{bmatrix}0 & -1\\1 & 0\end{bmatrix}\end{matrix}~~~~~~\begin{matrix} x軸反転\\\begin{bmatrix}1 & 0\\0 & -1\end{bmatrix}\end{matrix}~~~~~~\begin{matrix} y軸反転\\\begin{bmatrix}-1 & 0\\0 & 1\end{bmatrix}\end{matrix}\]
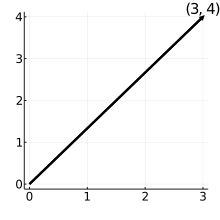
練習:一点の線形写像を行う
\[\begin{bmatrix}v_1 \\ v_2\end{bmatrix} = \begin{bmatrix} (2\times2)\\変換行列 \end{bmatrix}\begin{bmatrix}u_1 \\ u_2\end{bmatrix}\]
julia> T(t) = [ cos(t) -sin(t);
sin(t) cos(t)] #変換行列関数を定義
julia> u = [1;0 ]
2 -element Array{Int64,1 }:
1
0
julia> v = T(pi*60/180 ) * u # 60度回転
2 -element Array{Float64,1 }:
0.5000000000000001
0.8660254037844386
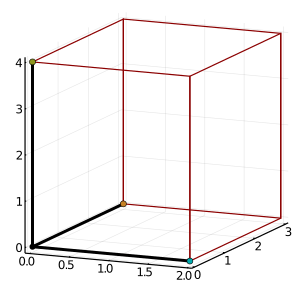
julia> plot( size = (300,280 )) #グラフ画面のサイズを指定
julia> plot!([0 , u[1 ]], [0 , u[2 ]],marker = 4 )
julia> plot!([0 , v[1 ]], [0 , v[2 ]],marker = 4 )
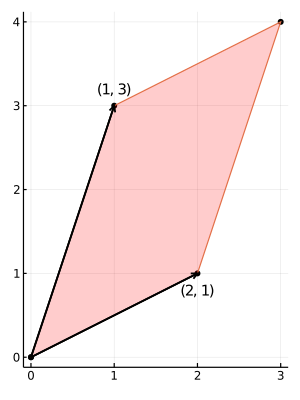
練習:複数点の線形写像を一気に行う
\[\begin{bmatrix}v_{11} & \cdots & v_{1n}\\ v_{21} & \cdots & v_{2n}\end{bmatrix} = \begin{bmatrix} (2\times2)\\変換行列 \end{bmatrix}\begin{bmatrix}u_{11} & \cdots & u_{1n}\\ u_{21} & \cdots & u_{2n}\end{bmatrix}\]
julia> u = [0 4 2 2 0 0 ; #矢印の頂点を定義
0 0 2 1 1 0 ]
2×6 Array{Int64,2 }:
0 4 2 2 0 0
0 0 2 1 1 0
julia> v = T(pi/2 ) * u
2×6 Array{Float64,2 }:
0.0 2.44929 e-16 -2.0 -1.0 -1.0 0.0
0.0 4.0 2.0 2.0 6.12323 e-17 0.0
julia> plot(size=(300,300 ),xlims=(-4,4 ), ylims=(-4,4 ))
julia> plot!(u[1 ,:], u[2 ,:])
julia> plot!(v[1 ,:], v[2 ,:])
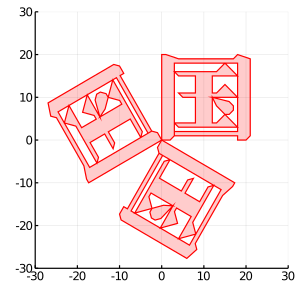
*実習:線形写像
下記のようなグラフを転換行列で作成する。作成したグラフをワードに挿入する。
• 手順1:次の txt ファイルを開き、マウスで、頂点の数値データだけ選んでコピーする。
► kuni.txt
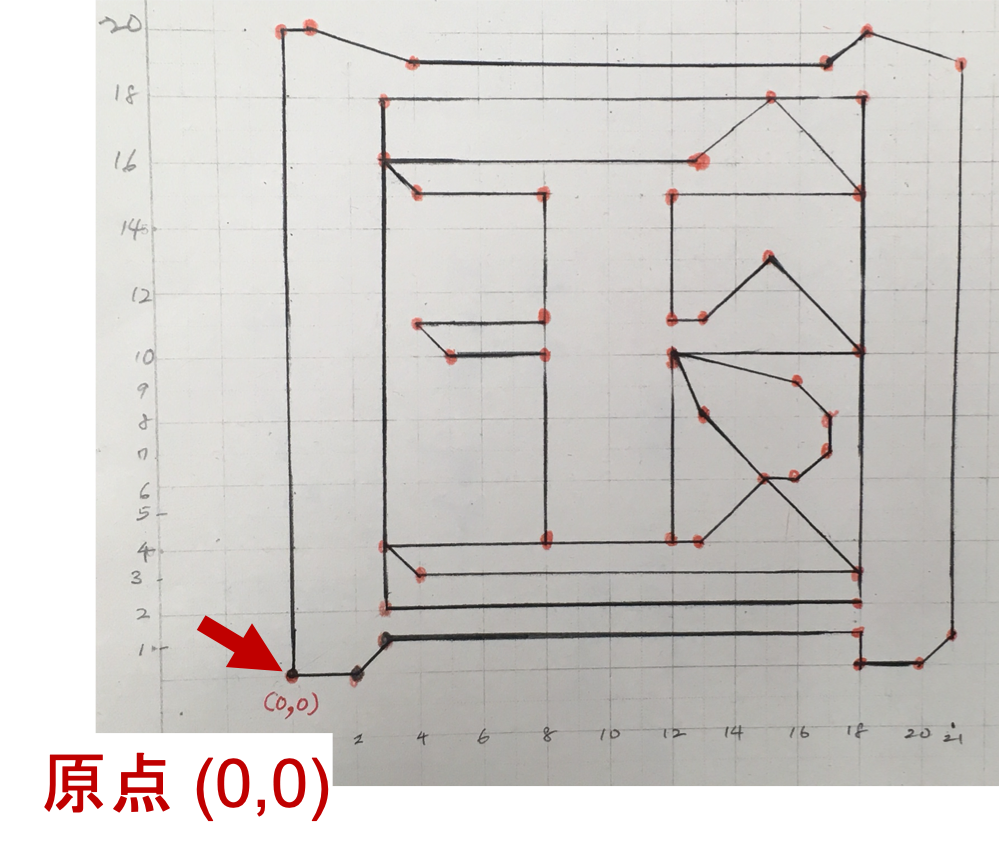
手順2:コピーしたデータで入力行列を作成:
julia> A = [#コピーしたデータをここに貼り付ける。
⋮ ⋮
8 4
3 4
3 1 ] #貼り付けったら、角括弧をつけてEnter
julia> A
51×2 Array{Int64,2 }:
3 1
18 1
⋮
3 4
3 1
• 手順3:作成した A は(51 × 2) の行列です。
• A 行列を (2 × 51) の行列に転置する。
julia> A = ❓
2×51 Transpose{Int64,Array{Int64,2 }}:
3 18 18 20 21 21 …
1 1 0 0 1 19 …
• 手順4:新しい頂点の B と C 行列 (2 × 51) を転換行列で作成する。
julia> B = ❓ * A
2×51 Array{Float64,2 }:
…
…
julia> C = ❓ * A
2×51 Array{Float64,2 }:
…
…
• 手順5:グラフ画面のサイズとグラフの範囲を指定する。色を変えて見てください。
• 下記の 0.2 という数字は 塗りつぶしの 透明度です。
julia> plot(size = (300,300 ), xlims = (-30,30 ), ylims = (-30 , 30 ), legend = false)
julia> plot!(A[❓], A[❓], fill = (0 , 0.2 ,"red" ), linecolor = "red" )
julia> plot!(B[❓], B[❓], fill = (0 , 0.2 ,"red" ), linecolor = "red" )
julia> plot!(C[❓], C[❓], fill = (0 , 0.2 ,"red" ), linecolor = "red" )