笛吹市・山梨大学地域連携事業支援プロジェクト
モモのせん孔細菌病要因追及のための地理情報システム(GIS)の構築と
情報収集・分析
-

葉の病斑
感染した葉はたくさんの穴が開き,落葉が多くなると収穫できるモモの数が減る
-

枝の病斑
枝に感染するとそこから先に葉が展開しなくなる
-

果実の病班
果実に感染すると褐色の点々がでて、ひどくなると穴が開き商品価値がなくなる
モモのせん孔細菌病は、上の画像のように葉や枝、果実に細菌が侵入することでモモ樹木の成長に大きな影響を及ぼす。その結果、生産個数が減り、農家の収益を減少させる。 この病気は薬剤だけでは防除できず、従来は農家の経験をよりどころとする耕種的防除で対策を行ってきた。
経験に頼ったこれまでの防除対策を、地理情報システム(GIS)を構築し、形式知化することで、農家の負担軽減と安定した収穫量確保を目指す。
さらに、画像解析とスマートグラスによる病斑検出装置の研究開発を行うことで、新規参入者でも容易な耕種的防除の実現を目指す。

-

検出した病斑部位
-

表示された位置で剪徐
重複肢体不自由者の3次元空間把握のための視線入力訓練と移動支援ロボットでの実証
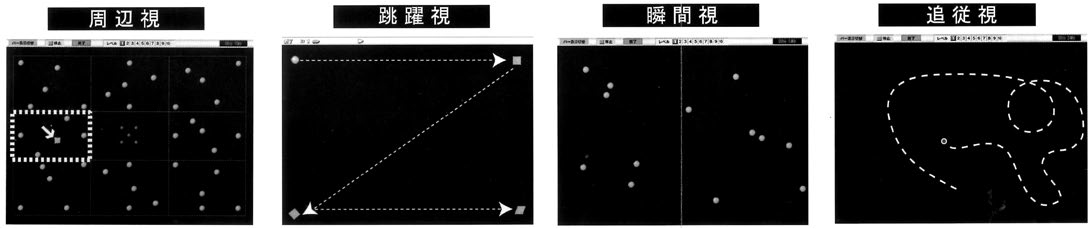
「動体視力ソフト」の課題画面例((株)アフィン)

これまでの研究から、重複肢体不自由者の視線入力を利用した、他者とのコミュニケーション支援を実現した。次の課題は移動である。重複肢体不自由者にとって唯一の意思表示の手段である視線入力を利用して、本人の意思による移動の実現を目指す。
はじめに、2次元での視線入力方法の評価、3次元空間での視線追従方法の提案、評価方法の検討、実装を行う。
次に、本人の視線を用いて、速度コントロール可能で自由に経路を選択できる移動方法を実現し、センサ情報や制御による「絶対にぶつからない」移動支援ロボットを研究開発する。
その後、視線入力訓練法はマニュアル化し、より多くの重複肢体不自由者の移動支援につなげる。
大村智記念学術館における案内ロボットが人の行動に与える影響

案内ロボット動画(9分25秒、音声あり)
https://www.youtube.com/watch?v=-knSJeTTfSc&t=12s
-

大村智記念学術館外観
-

研究概要
-

アイトラッキング装置
-

被験者注視画像
大村智記念学術館の来館者の動線と注目対象、来館者の属性(年齢、性別、居住地、職業)、満足度をパーソナルライフレコード(PLR)として収集し、案内ロボットの導入前後で動線の変化や注目対象の変化、満足度の変化を比較、検討する。手法として、展示コーナーに監視カメラを設置し、映像から来館者の動線を画像処理により自動検出する。
さらに視線移動計測装置を用いて、来観者の視線の移動を計測し、収集した動線データと合わせる。
案内ロボットが与える影響を明らかにすることにより、ロボットが社会生活に取り入れられた際の新たな価値を推察する。
