モモにおけるモモシンクイガ被害果の検出システム
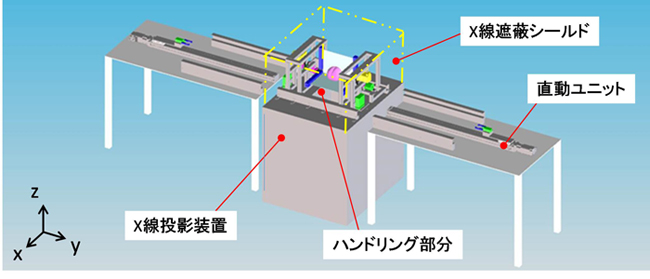
図1:モモシンクイガのモモ被害果検出システムのメカ・ハードウエア構成図
図1にシステム構成図を示す。処理の概要手順は以下の通りである。
1.果実ハンドリングロボットハンドが作業者、もしくは、ベルトコンベアから検査対象果実を柔軟シートの弾性を利用して傷めずにピックアップ
2.果実ハンドリングロボットハンドが検査対象果実を2次元X線透視装置下に移動・回転
3.検査対象果実の種の影の影響を避けるためと、検出精度向上のため、複数姿勢で2次元X線装置がモモを撮影
4.撮影画像を「モモシンクイガ判定PC」上のソフトウエアでデジタル画像処理
5.「良品」ならば「左方向」に移動、そうでない場合「右方向」に戻る。
6.判定結果を操作者前のディスプレイに表示

図2:画像処理結果例
モモシンクイガの判定はデジタル画像処理で行う。判定PCは、Microsoft Windowsオペレーティングシステムを採用し、画像処理ライブラリとして世界中の研究者が使用しているOpenCVを利用する。開発環境はMicrosoft
Visual Studio Express Edition である。どちらもフリーのソフトウエアで販売時のライセンス料は不要である。
図2に画像処理結果例を示す。複数枚の取得画像から中心探索を行い、フィルタ画像を作成、マスク処理を行った後、輝度勾配ベクトルを求める。求めた輝度勾配ベクトルを利用して集中度フィルタをかけ、モモシンクイガの幼虫の食害による空隙が存在するかを判定する。