山梨大学 圧電フロンティア研究ユニット
アクチュエータ応用
 担当:石井孝明
担当:石井孝明
所属:情報メカトロニクス工学科
専門:強力超音波工学
トピックス
「15th IFToMM World Congress」で優秀論文賞を受賞
令和元年6月30日(日)~7月4日(木)、ポーランド共和国マウォポルスカ県クラクフで開催された機械工学分野の国際会議「15th IFToMM World Congress」で、工学部の寺田英嗣 教授・牧野浩二 准教授・北野雄大 助教・名取智紘さん(平成30年度修士課程工学専攻修了生)・石井孝明 教授の研究グループが優秀論文賞を受賞しました。
受賞題目は「Development of an ultrasonic controlled growing rod system for spinal implants」で、成長期の脊柱側弯症患者に使用する超音波駆動による脊椎伸長装具の駆動原理と基本構造の提案をしたものであり、その新規性・独自性が評価されました。
山梨大学HP
「IEEE HSI 2019」で論文賞を受賞
令和元年6月25日(火)~27日(木)、アメリカ合衆国バージニア州リッチモンドで開催された人間協調システム分野の国際会議「12th IEEE International Conference on Human System Interaction IEEE HSI 2019」で、工学部の北野雄大 助教・牧野浩二 准教授・石井孝明 教授・名取智紘さん(平成30年度修士課程工学専攻修了生)・寺田英嗣 教授の研究グループが論文賞を受賞しました。
受賞題目は「Development of a vibration exciter for ultrasonic controlled growing rod system at minimally invasive surgery」で脊椎側湾症のより簡易な治療方法の確立を目的として、人体内部で伸縮する特殊なロッドシステムの作成方法を示しました。本論文では特にロッドシステムを動かすための超音波加振器の設計手順について示し、これらの実績が評価されました。
山梨大学HP
研究概要
圧電セラミックスを応用した超音波アクチュエータの研究を中心に行っています。最近は、ランジュバン振動子と伝送線を利用したマイクロ超音波モータの研究に力を入れています。その他に、超音波プラスチック溶接、ランジュバン振動子を利用したπ形超音波モータ、などに関する研究を行っております。
圧電セラミックスは、電圧を印加すると伸びたり縮んだりする特殊な性質を持っています。その性質を利用して圧電セラミックスから動力を取り出すことができ、そのような機能を持ったデバイスを圧電アクチュエータと呼びます。
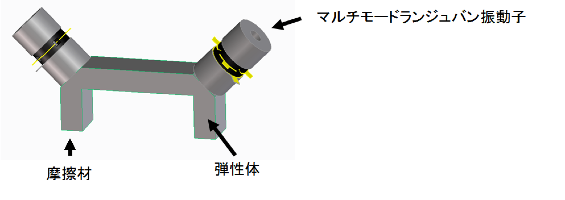
○ランジュバン振動子と伝送線を利用した超音波マイクロモータ
通常、超音波マイクロモータを実現しようとすると、電気的入力部分であるPZT素子の直径も小さくなり、出力を大きくすることが困難になります。そこで普通サイズの入力部分から振動を絞りこむことで小径の出力部分を駆動することを試みています(図1)。小径でありながら大きな出力を出せるように日々改善を続けています。

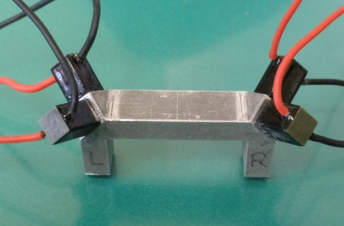
○積層圧電アクチュエータを利用した多自由度超音波アクチュエータ
積層圧電アクチュエータを四個利用することで(図2)、多自由度の回転を得られるアクチュエータを実現することができます。駆動する圧電アクチュエータの組合せや、位相差を工夫することで、図3に示すような各軸回りの回転を得ることができます。
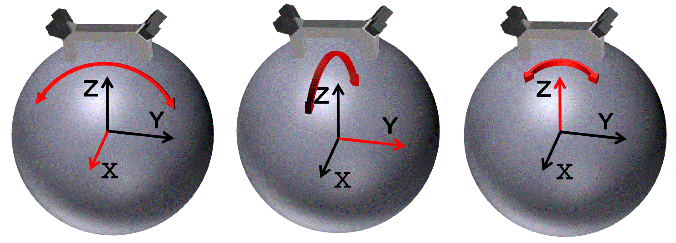
○多自由度ランジュバン振動子を利用した超音波アクチュエータ
通常は縦振動を励振するランジュバン振動子ですが、使用するPZT素子の電極を分割することで、たわみ振動モードも励振出来るようにした特殊なランジュバン振動子を提案しました。たわみ振動は、電圧を印加する電極により二方向のたわみ振動を励振できます。縦振動、たわみ振動を組み合わせることで、3軸周りの回転を得ることができました(図4)。
圧電体に関する主な研究業績
- Yudai Kitano, Koji Makino, Takaaki Ishii, Tomohiro Natori and Hidetsugu Terada, “Development of a vibration exciter for ultrasonic controlled growing rod system at minimally invasive surgery.” The 12th IEEE International Conference on Human System Interaction, IEEE HIS 2019, June 25 – June 27, 2019 (Richmond, U.S.A.).
doi: 10.1109/HSI47298.2019.8942623 - Hidetsugu Terada, Koji Makino, Yudai Kitano, Tomohiro Natori and Takaaki Ishii, “Development of an ultrasonic controlled growing rod system for spinal implants.” The 15th IFToMM World Congress, June 30 – July 4, 2019 (Krakow, Poland).
doi: 10.1007/978-3-030-20131-9_133 - Takaaki Ishii, et al, “An ultrasonic motor using transmission line and spiral structure driven by a Langevin transducer.” IEEE, 2015 International Ultrasonics Symposium, P3C3-4.
- Takaaki Ishii, et al, “An ultrasonic motor using transmission line and horn with oblique slits driven by a Langevin transducer.” IEEE, 2015 International Ultrasonics Symposium, P3C3-3.
- Takaaki Ishii, et al, “An Ultrasonic Motor using Thrust Bearing with Dimple Structure on the Friction Surface.” 2014 International Conference on Mechatronics Technology, 59 (ICMT2014).
- Takaaki Ishii, et al, “Multi-mode Langevin transducers for p-shaped ultrasonic motor with multi-degree of freedom.” IEEE, 2014 International Ultrasonics Symposium, pp.1563-1565.
- Takaaki Ishii, et al, “An ultrasonic motor using transmission line with oblique slits driven by a Langevin transducer.” IEEE, 2013 International Ultrasonics Symposium, pp.475-477.
- Takaaki Ishii, et al, “An ultrasonic motor using thrust bearing for friction drive with lubricant.” IEEE, 2013 International Ultrasonics Symposium, pp.197-200.